Detailní popis
Rozhraní pro 8 serv s možností jištění dvěma bateriemi a dvěma přijímači. Integrovaná telemetrie, samostatné jištění všech výstupů - vysoká spolehlivost.
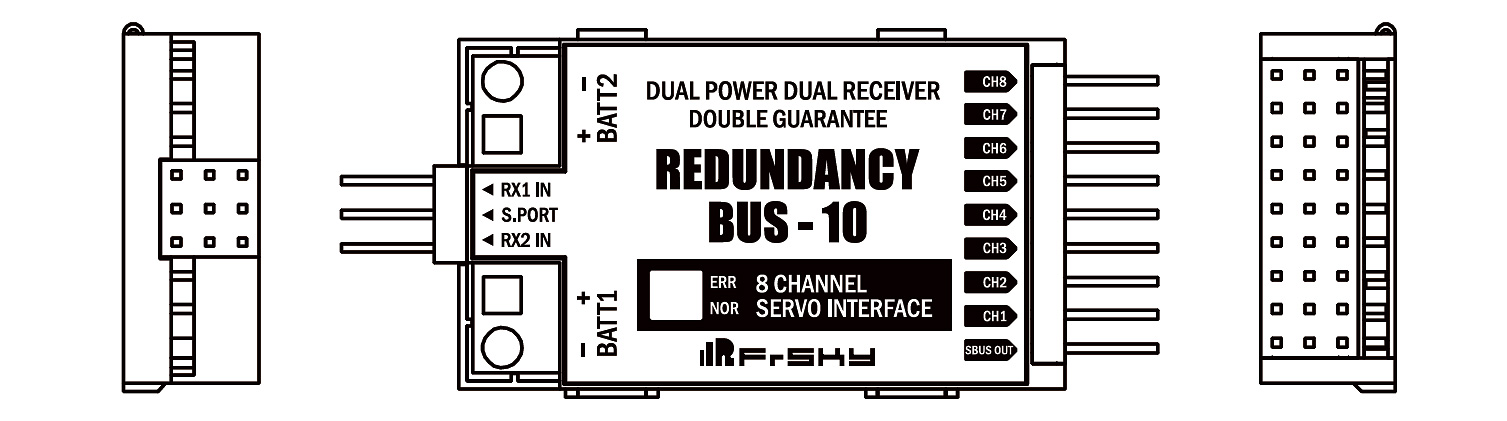
Schéma:
-
CH1~CH8 - konektory pro připojení serv (PWM)
-
S.PORT – připojení S.Port z přijímače série X pro zpětnou vazbu integrovaných S.Port hodnot ( včetně napětí, indikace přetížení, aj.)
-
SBUS OUT – SBUS výstup
-
RX1 IN – připojení SBUS přijímače 1 série a napájení připojeného přijímače
-
RX2 IN – připojení SBUS přijímače 2 série a napájení připojeného přijímače
Vlastnosti:
-
Ochrana proti přetížení na každém kanále a RXS
-
Zdvojené napájení a dva přijímače znamenají vysokou úroveň spolehlivosti a bezpečnosti
-
50Hz na servo výstupech (20ms perioda) nebo odpovídající cyklu na vstupu SBUS
-
Na výstupu pro serva nastavitelná perioda signálu
-
HV podpora serv
-
Kompaktní velikost s možností aktualizace firmware
Specifikace:
-
Doporučený rozsah vstupního napětí: 4-8.4V
-
Počet serv: 8 a víc (8 PWM výstupů, 16 SBUS)
-
Provozní teplota: -20~75°C
-
Váha 10g
-
Rozměry: 63x27x10.5mm
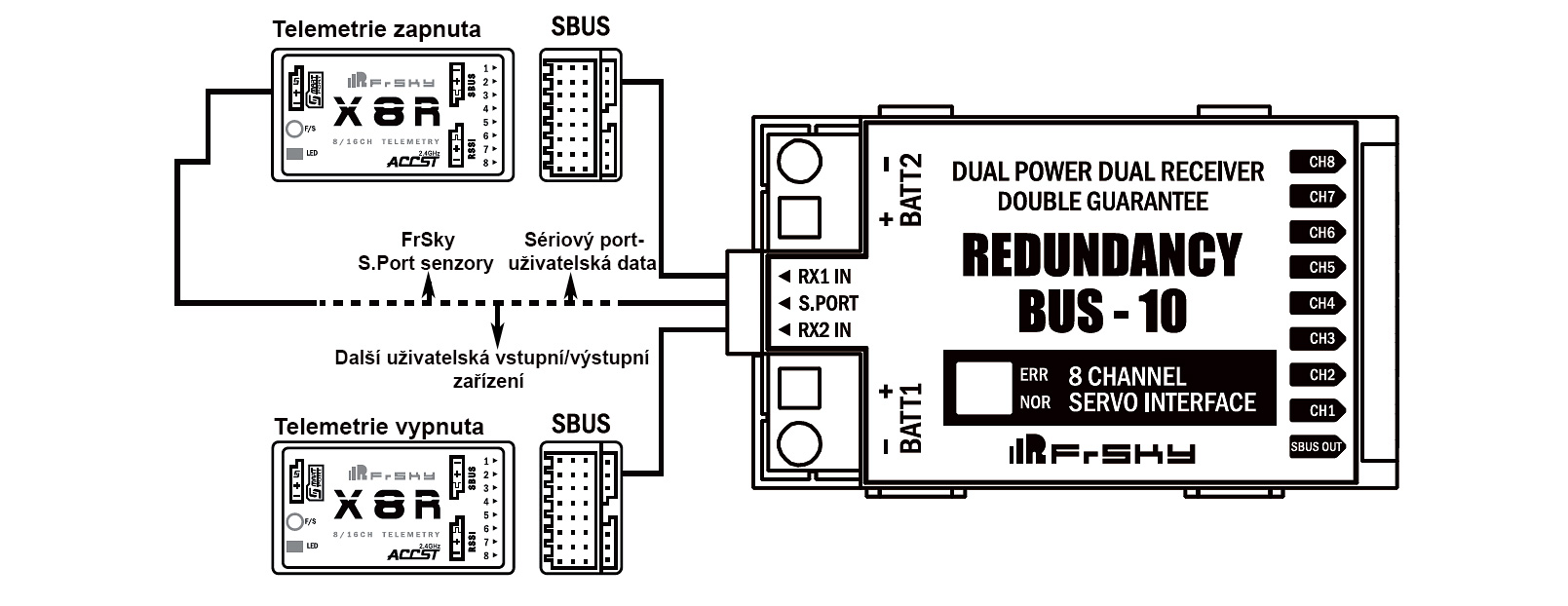
Redundancy Bus-10 je rozvaděč s jistícími prvky a integrovanou telemetrii. Slouží pro připojení dvou napájecích baterii, dvou přijímačů a dalších S.Port senzorů nebo jiných uživatelských zařízení.
Redundancy Bus-10 není vybaven stabilizačním okruhem nebo regulátorem napětí. Proto je nutné zvolit vhodné napájecí baterie tak, aby odpovídali max. povolenému napětí použitých serv. Vstupní napětí je tedy stejné jako výstupní napětí pro serva. (například: když použijete pro napájení 2S LiPol musíte použít HV serva)
Nepřipojujte na jeden výstup Redundancy Bus víc jak jedno servo. Nepoužívejte Y kabel pro připojení více serv na jeden výstup Redundancy Bus.
Propojení S.Port Redundancy Bus s přijímačem při použití dalších S.Port senzoru proveďte připojení má konec senzorů, nebo lze využít pro připojení Y kabel.
Napájení:
Napájení Redundancy Bus-10 může být provedeno z jedné baterie/BEC (připojit lze na vstup BATT1 nebo BATT2), nebo dvou baterii(připojeno na vstupy BATT1 a BATT2). Pokud použijete zdvojené napájení, dbejte na to aby obě baterie byly schopny dodat 15A stabilně a ve špičkách až 40A. Je to důležité pro správnou funkci ochrany proti přetížení.
Pokud bude napětí obou baterii stejné, Redundancy Bus-10 bude odebírat z obou baterii stejným dílem, pokud ale bude napětí rozdílné, upřednostní odběr z baterii s vyšším napětím přičemž každý zdroj je izolován/oddělen namísto sdíleného odběru.
Různé typy a počty článků jsou povolené – podmínkou je aby vyhovovaly max. provoznímu napětí použitých serv.
|
UPOZORNĚNÍ: nikdy nepřipojujte napájení do portu CH1~8, S.Port, SBUS OUT, RX1 IN nebo RX2 IN !!!
|
Ochrana proti přetížení:
Redundancy Bus-10 má integrovanou ochranu proti přetížení PPTC (tzv. vratnou pojistku) pro každý servo výstup. Při proudovém přetížení jednotlivého servo výstupu bude tento výstup odpojen od napájení při zachování napájení všech ostatní výstupů.
|
Poznámka: Každý kanál (včetně CH1-CH8, SBUS_OUT, RX1 IN, RX2 IN) má přepěťovou ochranu. Každý kanál snese trvale zatížení 2.5A při 25°C. Odpojovací proud je 5A za stejné teploty okolí. O odpojení budete informování telemetrii.
|
Připojení:
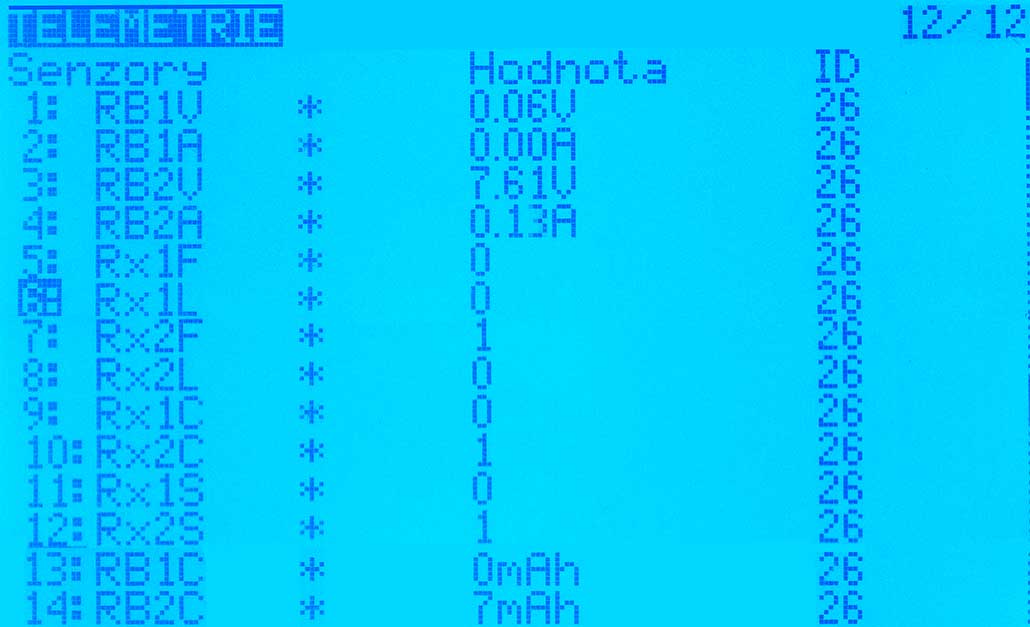
Hodnoty:
-
Napětí - aktuální napájecí napětí baterii na obou vstupech
-
Proud – servo status – v pořádku nebo přetížení, informace o stavu přijímačů, počet detekovaných kanálů a výstupní periodu serv.
-
Veškeré data jsou přenášena v reálném čase
|
|
|
Popis hodnot
|
|
|
1
|
RB1V
|
napětí baterie 1
|
V
|
|
2
|
RB1A
|
proud z baterie 1
|
A
|
|
3
|
RB2V
|
napětí baterie 2
|
V
|
|
4
|
RB2A
|
proud baterie 2
|
A
|
|
5
|
Rx1F
|
0: normální stav 1:RX1_Failsafe
|
|
|
6
|
Rx1L
|
0: normální stav 1:RX1_ztráta dat
|
|
|
7
|
Rx2F
|
0: normální stav 1:RX2_Failsafe
|
|
|
8
|
Rx2L
|
0: normální stav 1:RX2_ztráta dat
|
|
|
9
|
Rx1C
|
0: normální stav 1:RX1_odpojeno
|
|
|
10
|
Rx2C
|
0: normální stav 1:RX2_odpojeno
|
|
|
11
|
Rc1S
|
0: normální stav 1:RX1_bez signálu
|
|
|
12
|
Rx2S
|
0: normální stav 1:RX2_bez signálu
|
|
|
13
|
RB1C
|
celková spotřeba baterie1
|
mAh
|
|
14
|
RB2C
|
celková spotřeba baterie2
|
mAh
|
Nastavení výstupní periody pro serva:
Tovární nastavení výstupního signálu je 20ms. Pro analogová serva se nedoporučuje nastavovat kratší periodu. Může dojít k poškození serv.
V níže popsaných krocích nastavíte výstupní periodu pro servo výstupy:
-
Spojte signální piny na CH1 a CH2 propojkou
-
Připojte napájení k vstupu BATT1 nebo BATT2
-
Zeleně rychle blikající LED signalizuje, že proces nastavení výstupního signálu z továrního přednastavení 20ms byl synchronizován s přijímačem
-
Odstraňte propojku z CH1 a CH2, vypněte napájení.
Jak rozlišit mezi nastavením 20ms a nebo synchronizací s přijímačem.
Připojte přijímače do RX1 IN nebo RX2 IN, připojte napájení k BATT1 nebo BATT2. Pokud zelená LED rychle bliká, jsou výstupy synchronizovány s přijímačem, pokud svítí, je na výstupu nastaveno 20ms.
Pokud pracuje v synchronizovaném módu, perioda na PWM výstupu bude stejná jako na vstupu SBUS. Například – pokud je na SBUS 9ms , perioda PWM výstupu bude také 9ms.
Jestli je perioda SBUS na RX1 IN a RX2 IN odlišná a budou oba přijímače zapnuty současně, perioda na PWM bude převzata z přijímače s delší periodou.
Pokud ale bude některý z těchto přijímačů zapnut jako první, bude převzata perioda na PWM od tohoto přijímače.
Například: SBUS perioda přijímače na RX1 je 9ms zatímco RX2 je 18ms. Pokud oba dva přijímače zapnete v tu samou dobu, bude perioda na PWM 18ms. Pokud ale zapnete RX1 jako první a potom teprve RX2, bude perioda na PWM 9ms.
Jak změnit SBUS signál z negativního na pozitivní pro RX1 IN a RX2 IN:
SBUS signál z FrSky Redundancy Bus je negativní. Níže v bodech je popsáno jak změnit signál z negativního na pozitivní.
Vezměme například RX1 IN.
-
Propojte signální piny na CH3 a CH4 propojkou
-
Zapněte napájení na BATT1 nebo BATT2, zelená LED se rozsvítí
-
Odstraňte propojku a vypněte napájení a je to.
Poznámka:
Pokud výše uvedený postup zopakujete a budou propojeny piny CH5 a CH6 bude změněn signál na RX2 IN.
Pro tisk CZ návodu přejděte do složky "KE STAŽENÍ" nebo klikněte ZDE
EN návod k dispozici ZDE